Filtering
The quality of the derived DTM determines the quality of its subsequent archaeological interpretation. It is, therefore, essential that researchers present information concerning how the ALS data was post-processed and filtered. This will allow any future researchers to fully evaluate the techniques and quality of interpretation.
To derive a DTM, the point cloud of an ALS scan has to be classified into terrain and off-terrain points. Initially, all echoes, except the last echo, are discarded as these will always be off-terrain. The next stage is to discriminate between points which represent actual terrain reflection and those which are derived from other off-terrain features (notably dense vegetation).
It should be noted that there will remain a substantial number of off -terrain points in the last-pulse data. These will be predominantly due to gross errors (e.g. multi-path) and systematic errors (e.g. some points will still be from clearance piles or dense vegetation) which could not be removed completely by the full-waveform analysis.
These effects can be reduced by employing advanced filter methods. In our case, the technique of robust interpolation with an eccentric and unsymmetrical weight function was used (Kraus and Pfeifer, 1998). This process consists of an iterative procedure based on Kriging. It is organised within a hierarchic framework, which is implemented into the software package SCOP++. In the hierarchic framework, different strategies can be constructed by consecutively applying four main processing steps: thin-out, interpolate, filter, and sort-out.
Because it is possible to apply the four processing steps iteratively and change various parameters at each step, strategies can be defined for almost any type of situation (e.g. urban, open area, forest). This filtration process is also demonstrated in the EuroSDR Distance Learning Course "Filtering and Classification of Laser Scanner Data".
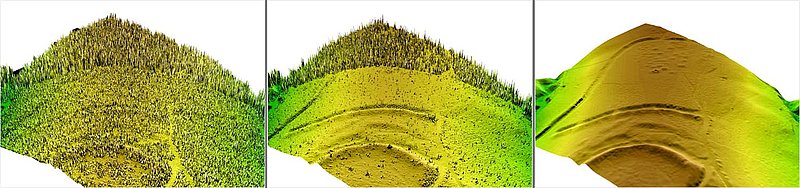
Left: DSM of the first pulse data showing the canopy of the scanned area. In the foreground, the vegetation consists of dense bushes. In the background there is a dense forest with understorey. Middle: DSM resulting from the unfiltered last echo point-cloud. There are many points, which represent, tree-trunks, very dense vegetation or narrow vegetation, which do not represent the actual ground. Right: filtered DTM showing even faint archaeological traces, as e.g. round barrows with shallow depressions from looting.
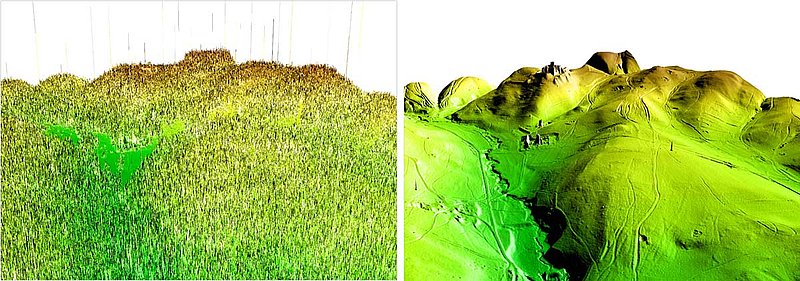
St. Anna in der Wüste: Left: DSM; Right: filtered DTM.